Posts in Category: interactive behavior
immediate interactive behavior
Paper: Juggling multiple tasks in a synthetic task environment
| Doing two things at once, like singing while you take a shower, is not the same as instant messaging while writing a research report. Don’t fool yourself into thinking you can multitask jobs that need your full attention. You’re not really having a conversation while you write; you’re shifting your attention back and forth between the two activities quickly. You’re juggling. When you juggle tasks, your work suffers AND takes longer — because switching tasks costs. |
| Gina Trapani, Work Smart, FastCompany.com |
Hansjörg Neth, Sangeet S. Khemlani, Brittney Oppermann, Wayne D. Gray
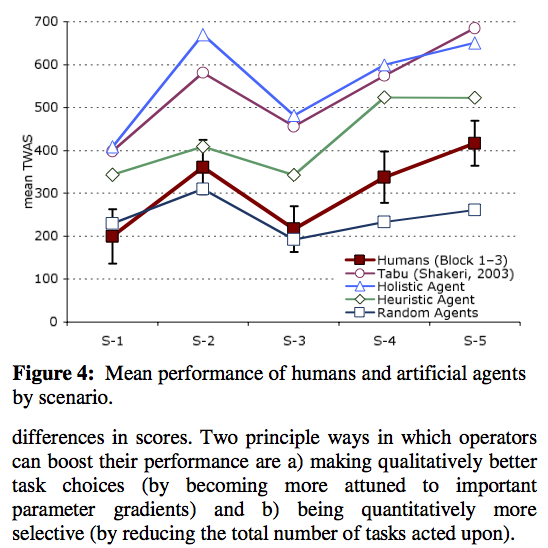
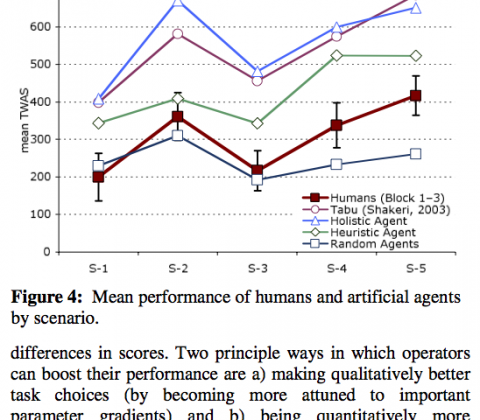
Juggling multiple tasks: A rational analysis of multitasking in a synthetic task environment
Abstract: Tardast (Shakeri 2003; Shakeri & Funk, in press) is a new and intriguing paradigm to investigate human multitasking behavior, complex system management, and supervisory control. We present a replication and extension of the original Tardast study that assesses operators’ learning curve and explains gains in performance in terms of increased sensitivity to task parameters and a superior ability of better operators to prioritize tasks. We then compare human performance profiles to various artificial software agents that provide benchmarks of optimal and baseline performance and illustrate the outcomes of simple heuristic strategies. Whereas it is not surprising that human operators fail to achieve an ideal criterion of performance, we demonstrate that humans also fall short of a principally achievable standard. Despite significant improvements with practice, Tardast operators exhibit stable sub-optimal performance in their time-to-task allocations.
Chapter: The functional task environment
The apparent complexity of our behavior over time is largely a reflection
of the complexity of the environment in which we find ourselves.
(Simon, 1996, p. 53)
Wayne D. Gray, Hansjörg Neth, Michael J. Schoelles
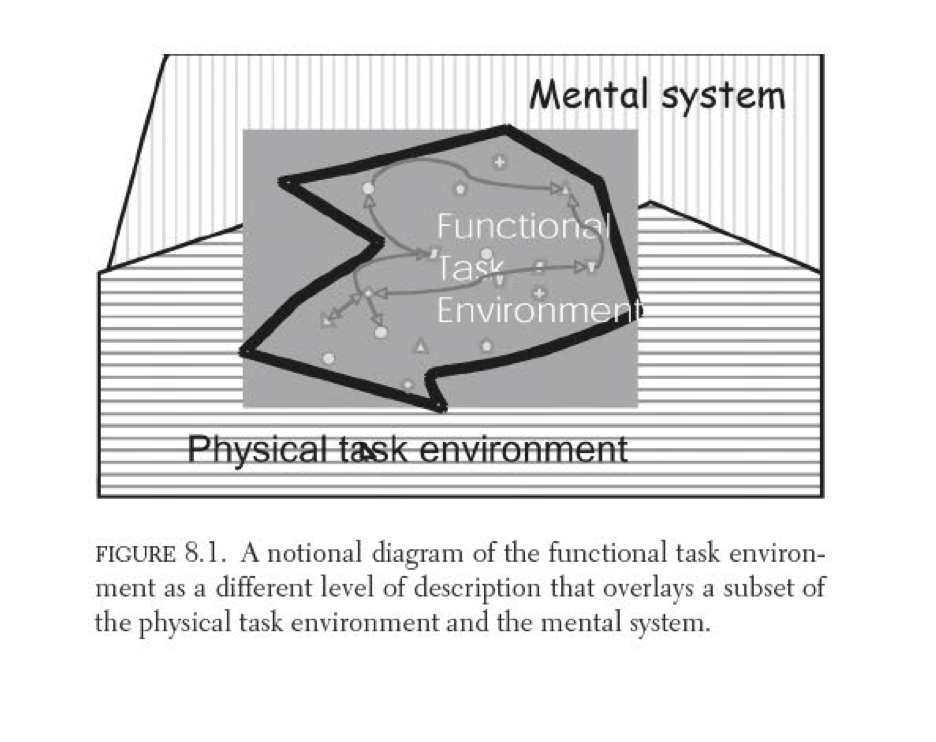
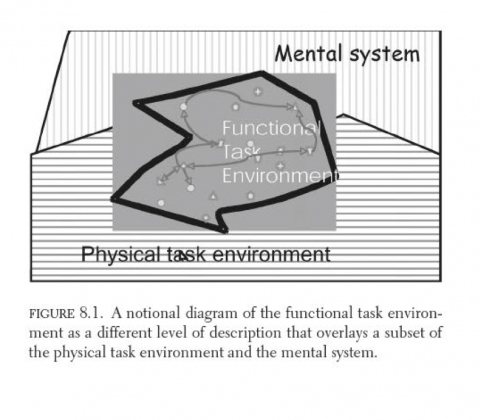
The functional task environment
From the introduction: Although human thought may be possible in those floatation tanks that are used to encourage meditative states, in by far the majority of instances thought occurs in the context of some physical task environment. The physical environment can be as simple as a light and book. It can be as complex as the face of a mountain and the equipment of the climber. It may be as dynamic as the cockpit of an F-16 in supersonic flight and as reactive as a firefight in Iraq or as heated as an argument between lovers.
Paper: Integrated models of cognitive systems
Michael J. Schoelles, Hansjörg Neth, Christopher W. Myers, Wayne D. Gray
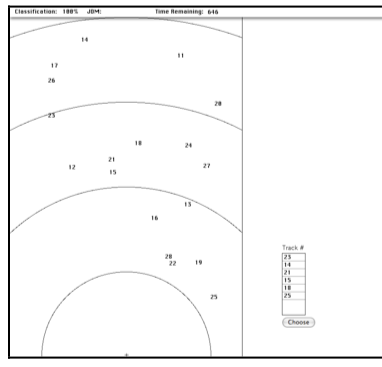
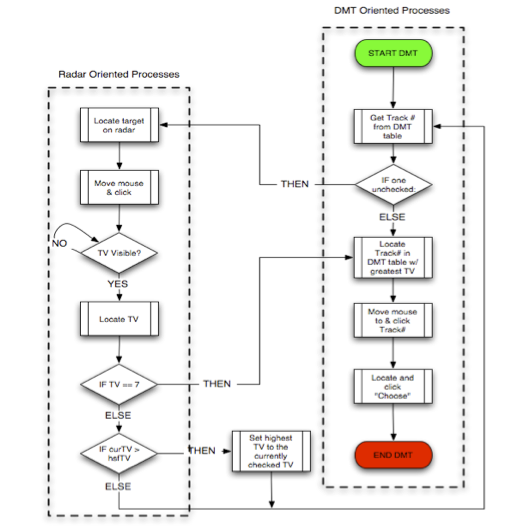
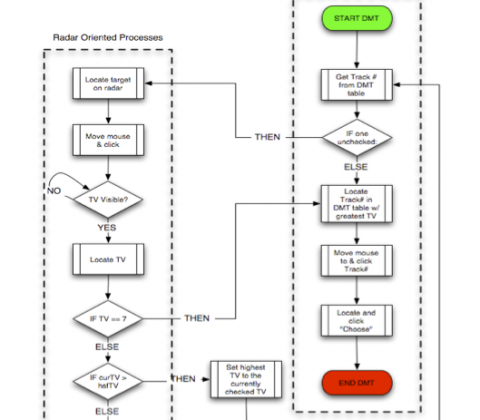
Steps towards integrated models of cognitive systems: A levels-of-analysis approach to comparing human performance to model predictions in a complex task environment
Abstract: Attempts to model complex task environments can serve as benchmarks that enable us to assess the state of cognitive theory and to identify productive topics for future research. Such models must be accompanied by a thorough examination of their fit to overall performance as well as their detailed fit to the microstructure of performance. We provide an example of this approach in our Argus Prime model of a complex simulated radar operator task that combines real-time demands on human cognitive, perceptual, and action with a dynamic decision-making task. The generally good fit of the model to overall performance is a mark of the power of contemporary cognitive theory and architectures of cognition. The multiple failures of the model to capture fine-grained details of performance mark the limits of contemporary theory and signal productive areas for future research.
Paper: simBorgs modeling dynamic decision making
| For the exogenously extended organizational complex functioning as an integrated homeostatic system unconsciously, we propose the term “cyborg”. |
| M.E. Clynes and N.S. Kline (1960), Cyborgs and Space (Astronautics, 13) |
Christopher W. Myers, Hansjörg Neth, Michael J. Schoelles, Wayne D. Gray
The simBorg approach to modeling a dynamic decision-making task
Abstract: The simulated cyborg (or, simBorg) approach blends computational embodied-cognitive models of interactive behavior with artificial intelligence based components in a simulated task environment (Gray, Schoelles, & Veksler, 2004). simBorgs combine human and machine components. This combination of high fidelity cognitive modeling (human) and AI (machine) facilitates the development of families of models that allow the modeler to hold components (memory, vision, etc) at different levels of expertise without concern for cognitive plausibility. For example, rather than modeling human problem solving, the modeler can rely on various black-box techniques (i.e., cognitively implausible AI), thereby focusing on predicting how subtle differences in costs and benefits in interactive methods affect performance and errors. The current modeling endeavor adopts the simBorg approach in order to build a family of interactive decision-making agents.