Paper: simBorgs modeling dynamic decision making
| For the exogenously extended organizational complex functioning as an integrated homeostatic system unconsciously, we propose the term “cyborg”. |
| M.E. Clynes and N.S. Kline (1960), Cyborgs and Space (Astronautics, 13) |
Christopher W. Myers, Hansjörg Neth, Michael J. Schoelles, Wayne D. Gray
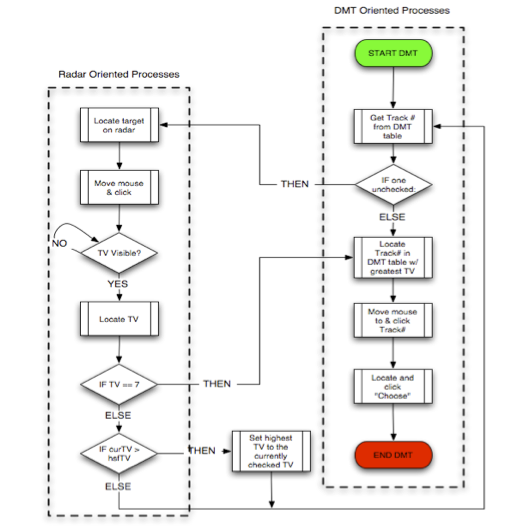
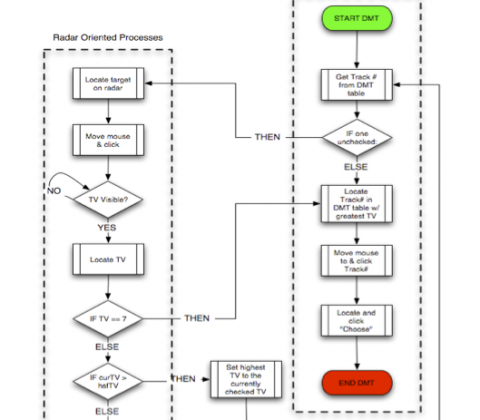
The simBorg approach to modeling a dynamic decision-making task
Abstract: The simulated cyborg (or, simBorg) approach blends computational embodied-cognitive models of interactive behavior with artificial intelligence based components in a simulated task environment (Gray, Schoelles, & Veksler, 2004). simBorgs combine human and machine components. This combination of high fidelity cognitive modeling (human) and AI (machine) facilitates the development of families of models that allow the modeler to hold components (memory, vision, etc) at different levels of expertise without concern for cognitive plausibility. For example, rather than modeling human problem solving, the modeler can rely on various black-box techniques (i.e., cognitively implausible AI), thereby focusing on predicting how subtle differences in costs and benefits in interactive methods affect performance and errors. The current modeling endeavor adopts the simBorg approach in order to build a family of interactive decision-making agents.
Keywords: computational cognitive modeling, simulated cyborgs (simBorgs), Argus Prime, immediate interactive behavior (IIB), rational task analaysis (RTA).
Reference: Myers, C. W., Neth, H., Schoelles, M. J., & Gray, W. D. (2004). The simBorg approach to modeling a dynamic decision-making task. In Proceedings of the 6th International Conference on Computational Modeling (ICCM), CMU, Pittsburg, PA (pp. 372–373). Mahwah, NJ: Lawrence Erlbaum.
Related: Integrated models of cognitive systems | dynamic memory updates in TRACS
Resources: Download PDF | Google Scholar
Comments are Disabled