Posts Tagged: JDM
judgment & decision making
Paper: Melioration despite informative feedback
| In many ways the word ‘meliorizing’ expresses a sensible middle way between optimizing and satisficing. Where optimus means best, melior means better. (…) Like a river, natural selection blindly meliorizes its way down successive lines of immediately available least resistance. The animal that results is not the most perfect design conceivable, nor is it merely good enough to scrape by. It is the product of a historical sequence of changes, each one of which represented, at best, the better of the alternatives that happened to be around at the time. |
| Richard Dawkins (1982), The Extended Phenotype: The Long Reach of the Gene, p. 46 |
Hansjörg Neth, Chris R. Sims, Wayne D. Gray
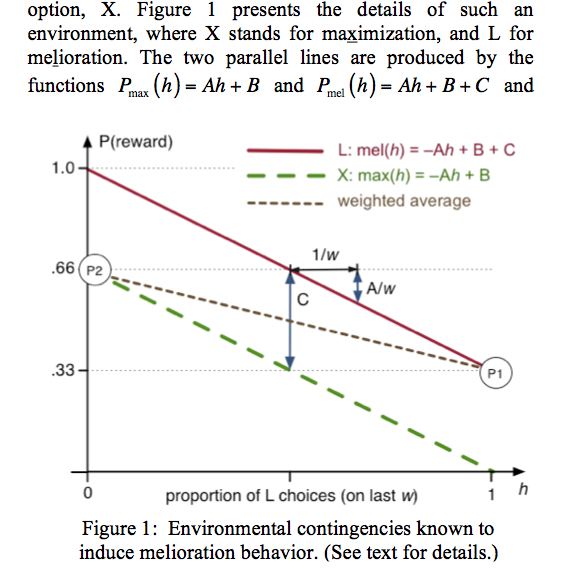
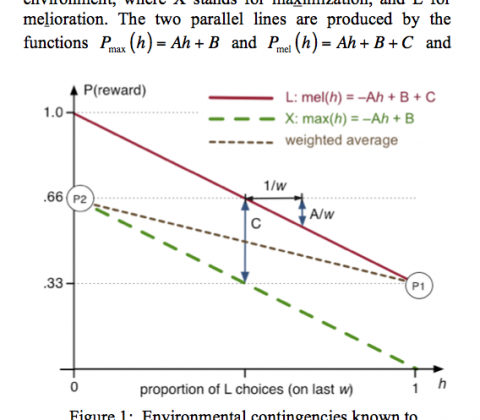
Melioration despite more information: The role of feedback frequency in stable suboptimal performance
Abstract: Situations that present individuals with a conflict between local and global gains often result in a behavioral pattern known as melioration — a preference for immediate rewards over higher long-term gains. Using a variant of a paradigm by Tunney & Shanks (2002), we explored the potential role of feedback as a means to reduce this bias. We hypothesized that frequent and informative feedback about optimal performance might be the key to enable people to overcome the documented tendency to meliorate when choices are rewarded probabilistically. Much to our surprise, this intuition turned out to be mistaken. Instead of maximizing, 19 out of 22 participants demonstrated a clear bias towards melioration, regardless of feedback condition. From a human factors perspective, our results suggest that even frequent normative feedback may be insufficient to overcome inefficient choice allocation. We discuss implications for the theoretical notion of rationality and provide suggestions for future research that might promote melioration as an explanatory mechanism in applied contexts.
Paper: Dynamic memory updates in TRACS
| You can’t play 20 questions with nature and win. |
| Allen Newell (1973) |
Hansjörg Neth, Chris R. Sims, Vladislav D. Veksler, Wayne D. Gray
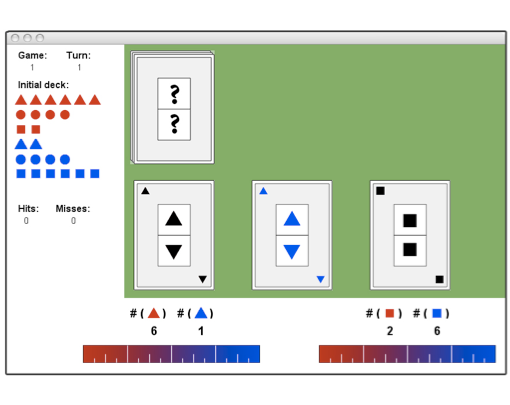
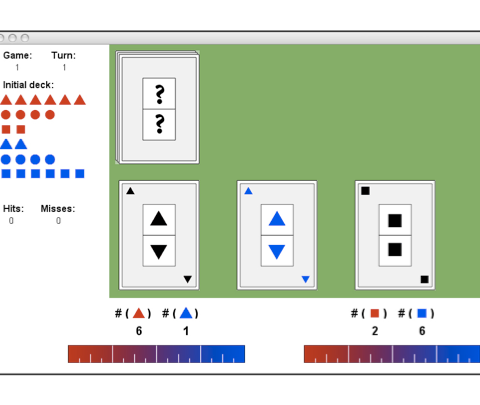
You can’t play straight TRACS and win: Memory updates in a dynamic task environment
Abstract: To investigate people’s ability to update memory in a dynamic task environment we use the experimental card game TRACS^tm (Burns, 2001). In many card games card counting is a component of optimal performance. However, for TRACS, Burns (2002a) reported that players exhibited a baseline bias: rather than basing their choices on the actual number of cards remaining in the deck, they chose cards based on the initial composition of the deck. Both a task analysis and computer simulation show that a perfectly executed memory update strategy has minimal value in the original game, suggesting that a baseline strategy is a rational adaptation to the demands of the original game. We then redesign the game to maximize the difference in performance between baseline and update strategies. An empirical study with the new game shows that players perform much better than could be achieved by a baseline strategy. Hence, we conclude that people will adopt a memory update strategy when the benefits outweigh the costs.
Paper: simBorgs modeling dynamic decision making
| For the exogenously extended organizational complex functioning as an integrated homeostatic system unconsciously, we propose the term “cyborg”. |
| M.E. Clynes and N.S. Kline (1960), Cyborgs and Space (Astronautics, 13) |
Christopher W. Myers, Hansjörg Neth, Michael J. Schoelles, Wayne D. Gray
The simBorg approach to modeling a dynamic decision-making task
Abstract: The simulated cyborg (or, simBorg) approach blends computational embodied-cognitive models of interactive behavior with artificial intelligence based components in a simulated task environment (Gray, Schoelles, & Veksler, 2004). simBorgs combine human and machine components. This combination of high fidelity cognitive modeling (human) and AI (machine) facilitates the development of families of models that allow the modeler to hold components (memory, vision, etc) at different levels of expertise without concern for cognitive plausibility. For example, rather than modeling human problem solving, the modeler can rely on various black-box techniques (i.e., cognitively implausible AI), thereby focusing on predicting how subtle differences in costs and benefits in interactive methods affect performance and errors. The current modeling endeavor adopts the simBorg approach in order to build a family of interactive decision-making agents.